ZW3D Hakkında
Son Gönderiler
-

-
 Çalışma Şekilleri ve Kullanım Amaçlarına Göre Lisans TipleriDevamını oku
Çalışma Şekilleri ve Kullanım Amaçlarına Göre Lisans TipleriDevamını okuÇalışma Şekilleri ve Kullanım Amaçlarına Göre Lisans Tipleri
-
 Robotik Uygulamalar ile 2 ve 3 Eksenli Sistemlerin 6 Eksenli Sistemlere DönüştürülmesiDevamını oku
Robotik Uygulamalar ile 2 ve 3 Eksenli Sistemlerin 6 Eksenli Sistemlere DönüştürülmesiDevamını okuRobotik Uygulamalar ile 2 ve 3 Eksenli Sistemlerin 6 Eksenli Sistemlere Dönüştürülmesi
-
 Endüstriyel Robotlar ve Kullanım AlanlarıDevamını oku
Endüstriyel Robotlar ve Kullanım AlanlarıDevamını okuEndüstride Kullanılan Robot Tipleri ve Kullanım Alanları
-

-

-

-

-

-

Kategoriler
Blog'da ara
Arşivlenmiş Gönderiler
Endüstriyel Robotlar ve Kullanım Alanları
İlayda Demirci
Endüstriyel robotlar, otomatik kontrollü ve çok amaçlı manipülatörler olup verileri toplayıp işleyebilme özelliğine sahiptir. Yeniden programlanabilir olması ve yapay zeka sayesinde yeni bir işe kolay bir şekilde adapte olacak şekilde tasarlanmışlardır. Kalite ve üretim artışını sağlamasının yanı sıra, insan sağlığına elverişsiz ve tehlikeli ortamlarda çalışan çalışanların sağlığını koruyarak iş güvenliğini sağlar.
ENDÜSTRİYEL ROBOT TİPLERİ
1-) Kartezyen Robotlar
Portal robotlar olarak da adlandırılan kartezyen robotlar, üç eksende kartezyen koordinat sistemini (X, Y ve Z) kullanır. Her üç eklemin de doğrusal (prizmatik) olması sebebiyle hareket doğrusal olmakla sınırlıdır ve buna bağlı olarak çalışma alanındaki hareket yeteneği zayıftır. Yapı tasarımının basit olmasından dolayı kolların hareketi kolaydır. Mekanik yönden çok sağlam olması sebebiyle bu robot tipi çok büyük boyutlarda ve ağırlıklarda nesneleri hareket ettirmek, taşımak için en uygun seçim olacaktır.
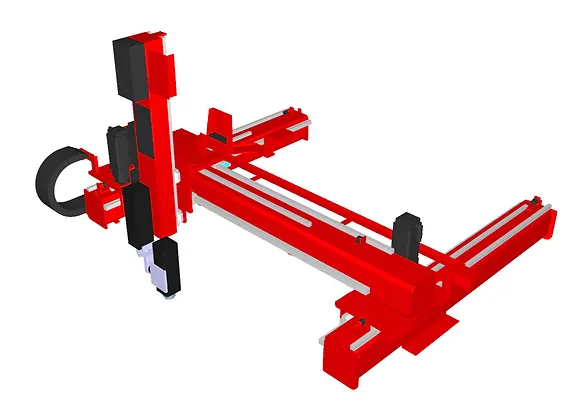
Kullanım Alanları: Kartezyen robotlar, daha çok CNC işleme ve 3B baskı için kullanılır. Bunun yanında, parçaların boyutunda bir sınırlama olmaksızın montaj işleminde veya alma ve yerleştirme uygulamalarında da kullanılabilirler.
2-) Silindirik Robotlar
Silindirik robotlar, tabana sabitlenen en az bir döner mafsala ve en az bir doğrusal ekleme sahip silindirik koordinatlarda hareket eden robotlardır. Bu tasarım için silindirik şekilli bir çalışma alanına ihtiyaç duyulduğundan dolayı faaliyet gösterebilecekleri alan sınırlıdır.
Kartezyen robotlarda olduğu gibi, büyük boyutlardaki nesneleri hareket ettirmek, taşımak için kullanılırlar. Bu tip robotlarda hidrolik motorlar tercih edilir. Belirli bir doğrultuda olmayan işlerde yüksek dönüş kabiliyeti ile kartezyen robotlara göre çok daha hızlıdırlar.

Kullanım Alanları: Özellikle dar çalışma alanlarında kullanılan silindirik robotlar, yuvarlak simetriye sahip olması gereken nesneler (örneğin teller, borular) için optimum bir seçimdir. Montaj, taşlama ve punta kaynağı uygulamalarında bu robot tipinden faydalanılır.
3-) Küresel Robotlar
Kutupsal ya da polar olarak da adlandırılan küresel robotlar, bir doğrusal eklem ve iki rotasyonel (döner) eklemin birleşimidir. Bu tasarım için küresel şekilli bir çalışma alanına ihtiyaç duyulduğundan dolayı faaliyet gösterebilecekleri alan sınırlıdır. Diğer robotlarla uyumsuz olması bu tür robotların ana dezavantajıdır.
Çoğunlukla makine montajlarında kullanılan bu robot tipinde elektrik motorları tercih edilir.

Kullanım Alanları: Küresel robotlar; cilalama, kaynak arkı, punto kaynağı, boyama, enjeksiyon, kalıplama, montaj uygulamaları, transfer işlemlerinde, test ve kontrolde ağırlıklı olarak kullanılmaktadır.
4-) SCARA Robotlar
Silindirik robotların özel bir formu olarak kabul edilen SCARA robotlar (Seçici Uyumluluk Montaj Robot Kolu), üç eksende hareket ettikleri için kartezyen robotlara benzer; fakat bu robotlardan farkı daha az hassas olması ve aynı zamanda dönebiliyor olmasıdır.
SCARA robotlar, maksimum 20 kg taşıma kapasitesine sahip olmasına rağmen çok hızlı ve esnek hareket özelliği ile çalışma hacmi içerisinde istenilen yere çok çabuk ulaşılabilmesini sağladığından özellikle montaj işlerinde en çok tercih edilen robot tipidir.
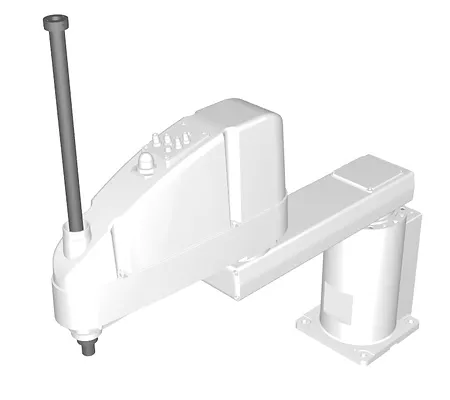
Kullanım Alanları: SCARA robotlar, genelde hafif (vidalar gibi küçük parçalar) ve orta elektronik mekanik montajında, parça test etmekte, malzeme taşımada, makine yüklenmesi ve boşaltılmasında kullanılmaktadır.
5-) Paralel Robotlar
Delta robotlar olarak da bilinen paralel robotlar, üç koldan oluşan ve her bir kol ekleminin de paralel olarak yerleştirilmesiyle kubbe şeklinde oluşturulmuş endüstriyel robot tipidir. Bu kollar, eş zamanlı doğrusal veya rotasyonel bağlantılara sahip makinelerdir. Bu tasarımın yararı, kollar içindeki ağırlığı azaltmasına bağlı olarak, çok yüksek hızlanma ve hız kabiliyeti sağlamasıdır. Paralel robotlar, 8 kg'ın altında, düşük bir taşıma kapasitesine sahiptirler.

Kullanım Alanları: Uçuş ve otomobil simülatörleri, paralel robotun en çok kullanıldığı endüstriyel uygulamalardır. Yüksek hızda hassas çalışma sağladığı için öncelikle alma ve yerleştirme uygulamalarında kullanılır. Ek işlemler arasında yapışkan dağıtımı, lehimleme ve montaj yer alır.
6-) Kolaboratif Robotlar
Kolaboratif robotlar (Cobot); tüm eklemlerinin döner olduğu, insan kol yapısı kıstas alınarak tasarlanmış, yüksek iş, verimlilik ve kalite hassasiyetine sahip robotlardır. Güvenli kullanım özelliği ile geleneksel endüstriyel robot uygulamalarında çitlere veya diğer güvenlik önlemlerine ihtiyaç duymadan güvenli bir çalışma ortamında insan-robot etkileşimini sağlar.
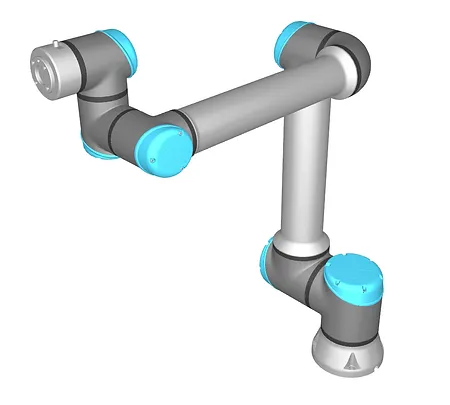
Kullanım Alanları: Kolaboratif robotlar; makine besleme, alma ve yerleştirme, montaj, ark kaynağı gibi çok çeşitli uygulama alanlarında kullanılabilirler; ancak standart bir cobot 15 kg'a kadar yük taşıyabileceği için genellikle ağır hizmet uygulamaları veya çok yüksek hızlı görevler için uygun değildirler.

Bu yazı ile edinmiş olduğunuz teorik bilgi altyapısına ek olarak, yapacağınız robotik projelerde, sadece RoboDK kütüphanesindeki robotlar ile sınırlı kalmayıp kütüphanede yer almayan modelleri, mekanizmaları, takımları da kütüphaneye ekleyebilirsiniz. Bu sayede, projenize çeşitlilik ve yenilik katabilirsiniz. Projenin uygulama öncesi simülasyonunu görebildiğiniz Offline ve Online Programlama yazılımına erişerek tüm bu robotlar ve daha fazlasına ulaşmak isterseniz RoboDK Programı’na göz atabilirsiniz.
Linke tıklayarak RoboDK hakkında genel tanıtım yazısının olduğu bir diğer blog yazımıza ulaşabilirsiniz.
Kategori:
Robotik
İlgili Gönderiler
-
Robotik Uygulamalar ile 2 ve 3 Eksenli Sistemlerin 6 Eksenli Sistemlere Dönüştürülmesi
Robotik Uygulamalar ile 2 ve 3 Eksenli Sistemlerin 6 Eksenli Sistemlere DönüştürülmesiDevamını oku
Leave a comment