ZW3D Hakkında
Son Gönderiler
-

-
 Çalışma Şekilleri ve Kullanım Amaçlarına Göre Lisans TipleriDevamını oku
Çalışma Şekilleri ve Kullanım Amaçlarına Göre Lisans TipleriDevamını okuÇalışma Şekilleri ve Kullanım Amaçlarına Göre Lisans Tipleri
-
 Robotik Uygulamalar ile 2 ve 3 Eksenli Sistemlerin 6 Eksenli Sistemlere DönüştürülmesiDevamını oku
Robotik Uygulamalar ile 2 ve 3 Eksenli Sistemlerin 6 Eksenli Sistemlere DönüştürülmesiDevamını okuRobotik Uygulamalar ile 2 ve 3 Eksenli Sistemlerin 6 Eksenli Sistemlere Dönüştürülmesi
-
 Endüstriyel Robotlar ve Kullanım AlanlarıDevamını oku
Endüstriyel Robotlar ve Kullanım AlanlarıDevamını okuEndüstride Kullanılan Robot Tipleri ve Kullanım Alanları
-

-

-

-

-

-

Kategoriler
Blog'da ara
Arşivlenmiş Gönderiler
Robotik Uygulamalar ile 2 ve 3 Eksenli Sistemlerin 6 Eksenli Sistemlere Dönüştürülmesi
İlayda Demirci
Endüstride en çok kullanılan imalat yöntemleri hiç şüphesiz 2 ve 3 eksenli, düz tablalı imalat yöntemleridir. 2 eksen için lazer kesim, su jeti ile kesim, plazma kesim gibi uygulamalar; 2,5 ve 3 eksenli işlemler için ise frezeleme ve hatta 3D printing örnek verilebilir.
Bu tür uygulamalarda, çoklu eksenlerde çalışılması halinde ekonomik anlamda farklılık ortaya çıkmaktadır. Örneğin, 2 eksenli bir lazer kesim tezgahı ile 5 eksen bir lazer kesim tezgahı arasında yüksek fiyat farkları mevcuttur. Aynı durum 3 eksen bir CNC işleme merkezi ile 5 eksen bir CNC işleme merkezi arasında da geçerlidir.
Bu soruna cevap verebilmek adına, 6 eksenli bir robotun çoklu eksene geçişte kullanılması hem geniş bir kullanım alanı hem de ekonomik bir çözüm olabilir. Gittikçe yaygınlaşan bu yöntemi bu yazımızda inceleyelim.
İki Eksenli Uygulamalar
2 eksenli sistemler, endüstriyel robotun 6. eklemine bir takım (tool) eklenmesiyle 6 eksenli sistemlere dönüştürülebilir. Plazma, su jeti ve fiber lazer kesim başlıkları, endüstriyel robotların kaldırabilecekleri hafifliklerde olmasından kaynaklı ve uygulama sırasında yüksek bir kuvvete maruz kalmamaları açısından robotla beraber çalışmak üzere kullanılan ideal takımlardır. Bu sebeple, sıklıkla robotik uygulamalarda tercih edilmektedirler.

Özellikle mermer gibi kesimi zor ve estetik beklentisi yüksek malzemelerde çok eksenli kesim önemli bir konudur.

Bilindiği üzere, yapısından ötürü lazer kesim gibi bir endüstriyel uygulamaya uygun olmayan, testere ile kesim gibi uygulamalarda da güçlük yaşanan mermeri şekillendirmede genellikle su jeti uygulaması kullanılmaktadır.

Robota eklenmiş bir su jeti başlığı ile 6 eksende kesim yapılabilmekte ve estetik şekiller ortaya çıkarılabilmektedir. Ters açılı kesimler ve giriş çıkış uygulamaları robotta alt program olarak tanımlanabilmekte ve uygulamalarda büyük kolaylık sağlanabilmektedir.
Tabii aynı durum lazer kesim ve plazma kesim için de geçerlidir. Buradaki önemli nokta, offline programlama için doğru takım yolunu çıkarabilmektir.
Bu tip 2 eksenli uygulamalarda sık karşılaşılan sorunlardan biri yerleşim sorunudur. Su jeti kesim havuzunda ya da lazer, plazma kesim tablasında kesilecek şeklin levhaya yerleşiminde yerleşim sorunu ortaya çıkmaktadır. Her kesim işleminde sıfırlama yapma ve yeniden koordinat alma zorlayıcı bir durumdur. Her ne kadar seri halde kesimde bu durum büyük sorunlara yol açmasa da, parça değişimi sonrasında ve atıl parçayı değerlendirme için yapılan kesimlerde tekrar tekrar sıfırlama gerekebiliyor.
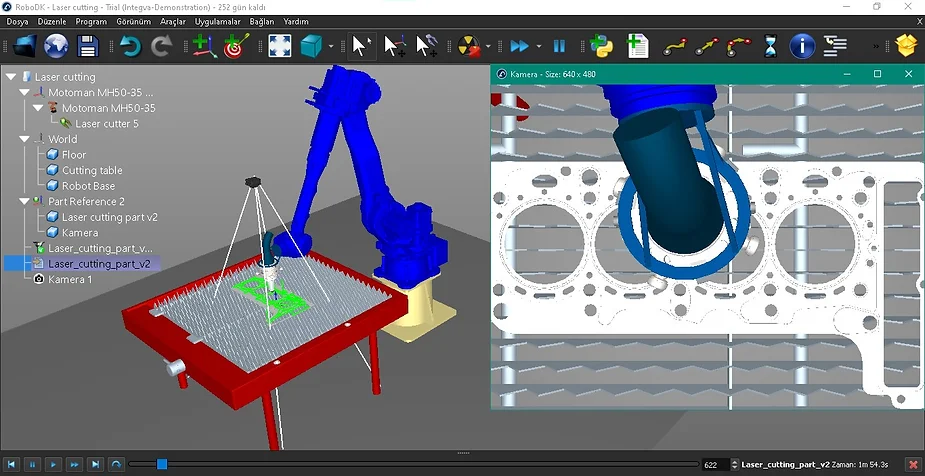
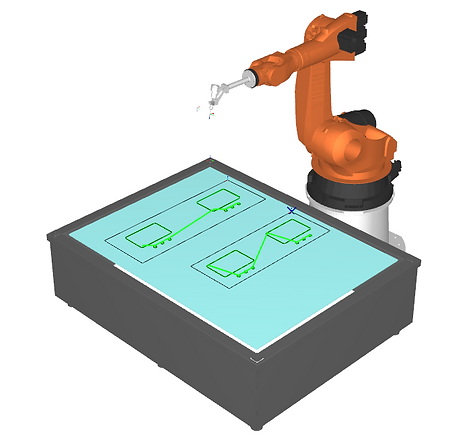
Bu noktada, RoboDK ile yapılan bazı uygulamalarda kamera ile yerleşim metodu bu tür durumlara çözüm niteliğindedir. Havuz ya da kesim tablası üzerine yerleştirilmiş ve kalibre edilmiş kamera ile anlık olarak alınmış görüntü, RoboDK arayüzündeki havuz yüzeyine yansıtılır. Bu sayede, sıfırlama yapmadan ve yeniden koordinat almadan bahsedilen yerleşim sorunu kolay bir şekilde çözülmüş olur.
Nesting programından alınan NC kod, doğrudan RoboDK içerisine yüklenebilir ya da dxf, step, igs gibi formatlar program içerisine yüklenerek kesim programı RoboDK içerisinde oluşturulabilir.
Uygulamaya yönelik olarak scriptler hazırlanabilir ve robot firması fark etmeksizin takım yolları oluşturulup robota yüklenebilir.
Üç Eksenli Uygulamalar
Endüstride en çok kullanılan imalat yöntemlerinden biri de CNC frezeleme işlemleridir. 2,5 - 3 veya 5 eksen CNC işleme merkezleri ya da CNC routerlar ile istenen parça, oluşturulan CAM kodu ile bir kütükten talaşlı imalat ile çıkarılır.
Yine bilindiği üzere, 3 eksen işlemlerde ters açılara erişmek mümkün değildir. Hatta, işleme tezgahının niteliğine bağlı olarak çoğu zaman farklı indekslerdeki 3 eksenli işlemleri yapmak dahi mümkün olmamaktadır. Bu sebeple, 3 eksenli tezgahlara bir divizör eklenmesiyle 4 eksene çıkarmak gibi çözümler uygulanmaktadır.
4 ya da 5 eksenli sistemler, 3 eksenli sistemlere nazaran oldukça pahalıdır. Ayrıca uygulamalarda çoğunlukla tezgaha yönelik olarak post çalışması yaptırmak gerekir; ancak 6 eksenli bir robota eklenecek olan bir spindle ile 5 eksenli bir robotik işleme merkezi kurulabilir.

Parça işlemede, parçaları işlerken karşılaşılan zıt kuvvetler ve spindle ağırlığı robotun kaldırabileceği maksimum ağırlığın aşılmasına sebep olabilir. Bu nedenle, genellikle robotla parça işleme uygulamaları alüminyum, çelik gibi metallere yapılmaz. Bunun yerine, sıklıkla ahşap, köpük, sünger ve plastik gibi daha yumuşak malzemelere kullanılmaktadır.
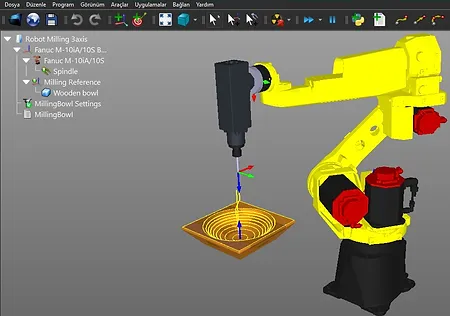
Örneğin, ZW3D CAD/CAM üzerinde oluşturulmuş bir NC kod doğrudan RoboDK üzerine yüklenip istenen robota uygun olarak robotik takım yoluna dönüştürülebilir. Çok eksenli delik delme işlemleri, pah kırma, ters açı kesim işlemleri için robotik uygulamalar büyük kolaylık sağlamaktadır.
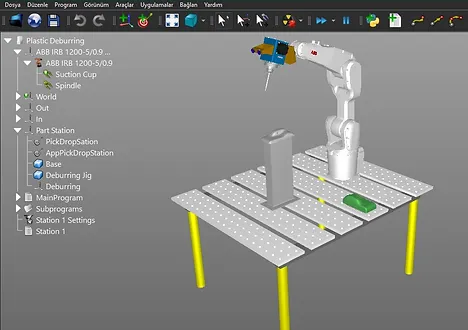
Bu uygulamalar sırasında, isteğe bağlı olarak takım değiştirme, ikili takım uygulamaları veya yükle - işle - boşalt uygulamaları da yapılabilir. Koparma + tesviye işlemi tek sistem üzerinde uygulanabilir. Robotla çalışmanın verdiği tüm özgürlüklerin imalat işlemlerinde kullanılmasıyla hem zamandan hem de ekonomik açıdan tasarruf sağlanabilir.

Bu yazımız ile birlikte, 2 ve 3 eksenli sistemlerin robot aracılığı ile 6 eksenli sistemlere dönüştürülürken karşılaşılan sorunlara ve RoboDK Programı ile kolay bir şekilde çözüme ulaşacağınızı düşündüğümüz yöntemlere yer vermeye çalıştık. Sizler de Offline ve Online Programlama yapabileceğiniz simülasyon yazılımına ulaşmak isterseniz RoboDK Programı’na göz atabilirsiniz.
Kategori:
Robotik
İlgili Gönderiler
-
Endüstriyel Robotlar ve Kullanım Alanları
Endüstride Kullanılan Robot Tipleri ve Kullanım AlanlarıDevamını oku
Leave a comment